

水面“浅小慢”目标检测是当前海洋观测与水下智能装备监测领域的技术难题,特别是在强烈太阳耀斑干扰下,传统视觉方法效果有限。本研究提出了一种偏振增强无耀斑网络 (Polarization-Enhanced Glint-Free Network, GFNet),能够在复杂光照条件下实现对包含浅水、慢速、小型 (3S) 无人水面航行器 (UUV) 等目标图像增强和分割。
何贤强研究员前期创新提出了基于平行偏振辐射分量(PPR)的水色偏振遥感新概念,表明PPR能有效减少水面耀斑的影响。基于该发现,本研究融合线偏振度 (DOLP)、偏振角 (AOP) 与平行偏振辐射 (PPR) 等多种偏振特征,构建了GFNet模型,显著提升了水面目标的检测与分割能力。进一步引入了相关驱动特征分解融合 (CDDFuse) 网络,构建了GF-CDDFuse目标分割网络,针对低频和高频特征进行分离与融合,有效抑制水面耀斑对分割精度的影响(图1为GF-CDDFuse模型算法结构图,图2为GFNet模型算法结构图)。
本研究开展了水池验证实验,采集了涵盖不同天气、时段、太阳高度角等多场景的偏振成像数据。实验结果显示,融合偏振特征的GFNet在KNet和FastSCNN等主流分割模型上,平均交并比 (mIoU) 分别达到86.39和70.47,显著优于传统方法,表明结合PPR抑制耀斑,可为水面目标的高效分割提供坚实基础(图3和图4)。
本研究首次将Retinex分解理论与偏振特征深度融合,有效分离并抑制复杂光照干扰,提升了水面小目标分割的鲁棒性和普适性。成果可为无人水面航行器(UUV)等“浅小慢”目标的自动化监测、海上安全预警提供科技支撑,也为偏振成像与多模态融合在遥感场景中的应用拓展了新思路。
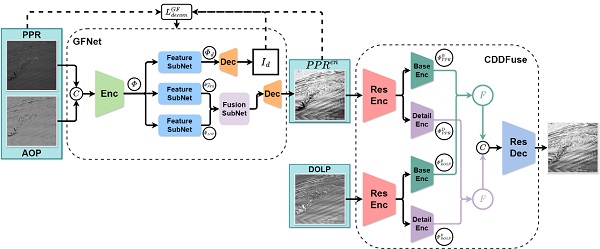
图1. 本研究GF-CDDFuse模型算法结构图
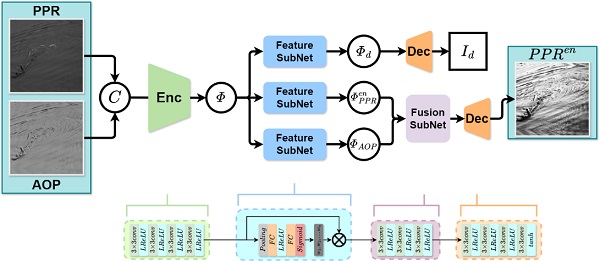
图2.本研究GFNet模型算法结构图。
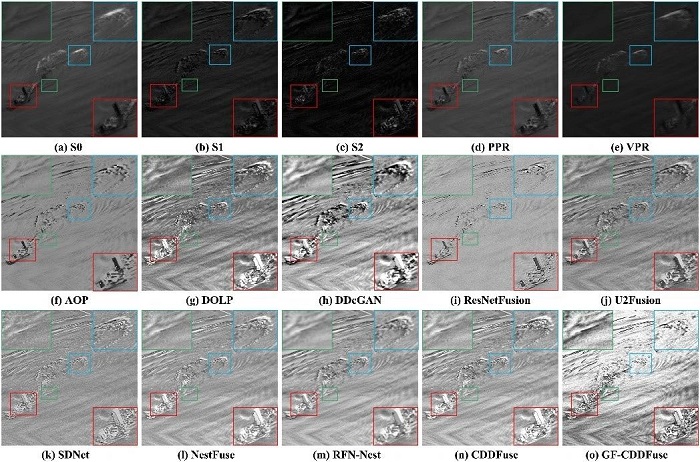
图3. 对2024年1月30日16:00拍摄的图像进行7种偏振参数和7种SOTA融合方法的视觉质量比较。为了便于更清晰的比较,包含UUV头部、白色泡沫和UUV导航波纹的区域分别在红色、蓝色和绿色框中被放大。
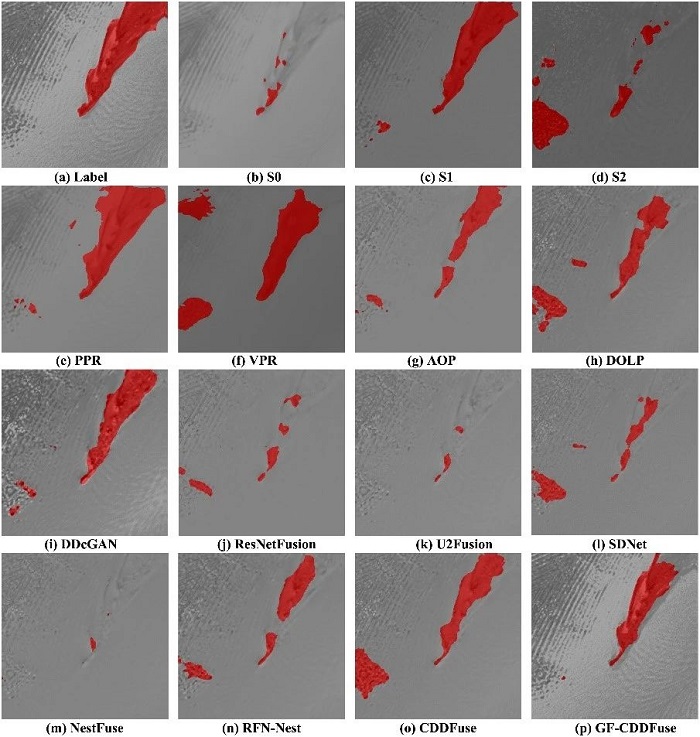
图4. 基于FastSCNN语义分割模型,采用7种偏振参数和7种SOTA融合方法,对2024年1月30日13:55采集的图像进行UUV分割。UUV标签显示在(a)中,其中UUV标记为红色。
论文引用:Pan, T., He, X.*, Bai, Y., Shanmugam, P., Li, T., & Gong, F. (2026). Polarization-enhanced GFNet for glint-influenced water surface object segmentation. Expert Systems with Applications, 296, 128956.
论文链接:
[1] He, X., Pan, D., Bai, Y., Wang, D., Hao, Z. (2014). A new simple concept for ocean colour remote sensing using parallel polarisation radiance. Scientific Reports, 4(1), 3748.
[2] Pan, T., He, X., Zhang, X., Liu, J., Bai, Y., Gong, F., & Li, T. (2022). Experimental Study on Bottom-Up Detection of Underwater Targets Based on Polarization Imaging. Sensors, 22, 2827.
地址:杭州市保俶北路36号
电话:+86-571-8196 3198
传真:+86-571-8883 9374
邮编:310012
Copyright©2019-2026 海洋遥感在线分析平台 版权所有
技术支持:寸草心科技 管理登录 浙ICP备10040255号-10

微信公众号

